Kontronik 2015
Kontronik+Sobek 2015
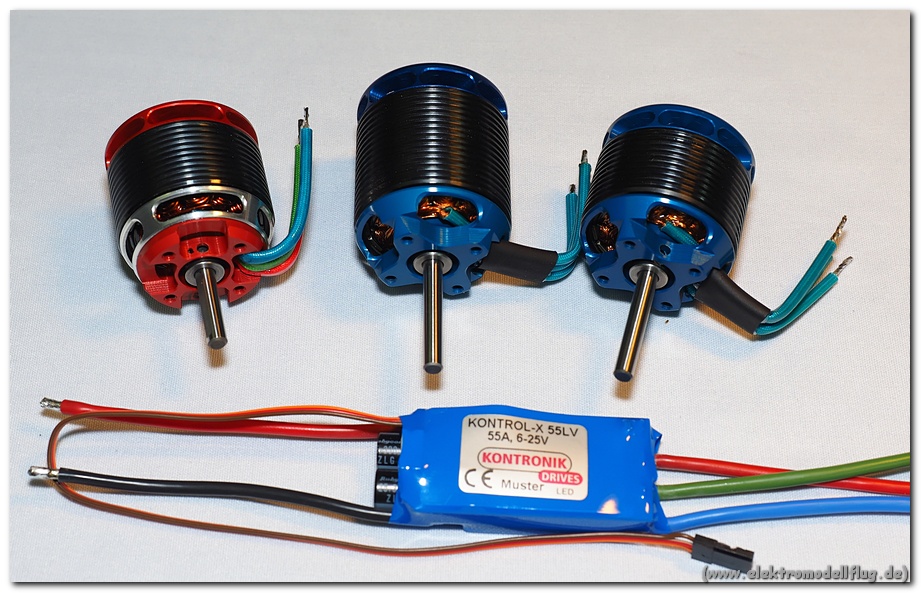
mit dem neuen Controller Kontrol-X
... und die größeren Spider -XL 20-45 und Spider-XL 20-38

... einmal in der Rück- und Frontansicht.
Micropyro 380-9:
Hier handelt es sich um einen ergänzenden Brushless-Hubiantrieb der die Leistungsskala nach unten abrundet. Endlich könnte man sagen, wird auch die Hubifraktion der "400'er" abgedeckt. Wer z. B. einen Logo 400(se), o. ä., sein Eigen nennt hat hier die Möglichkeit, einen leichten (nur 155g!) und sehr leistungsfähigen Motor zu nutzen, optimal gespeist aus einen 5s-LiPo, 4s bis 6s wären aber auch möglich. Allerdings sollte eventuell das Ritzel (mehr Zähne) zur Hauptrotorwelle angepasst werden um den vollen Leistungsdurchsatz auch genießen zu können. Er tritt u. a. als Alternative zum Scorpion HK4015/1070 oder Hacker A40-12S an.
Spider-X 15 bis XL-20:
Die Spider-X Motoren sind für den Antrieb professionell genutzter Multikopter entwickelt wurden. Vorab stellt Kontronik+Sobek in der 15- und 25-Statorgröße je drei Wicklungsvarianten und sechs Leistungsstufen (von 300W bis 1000W) bereit. Die Fertigungsqualität ist auf vergleichbar hohem Niveau wie bei den bekannten Pyro-Motoren. ... bis auf die Wicklungen ...
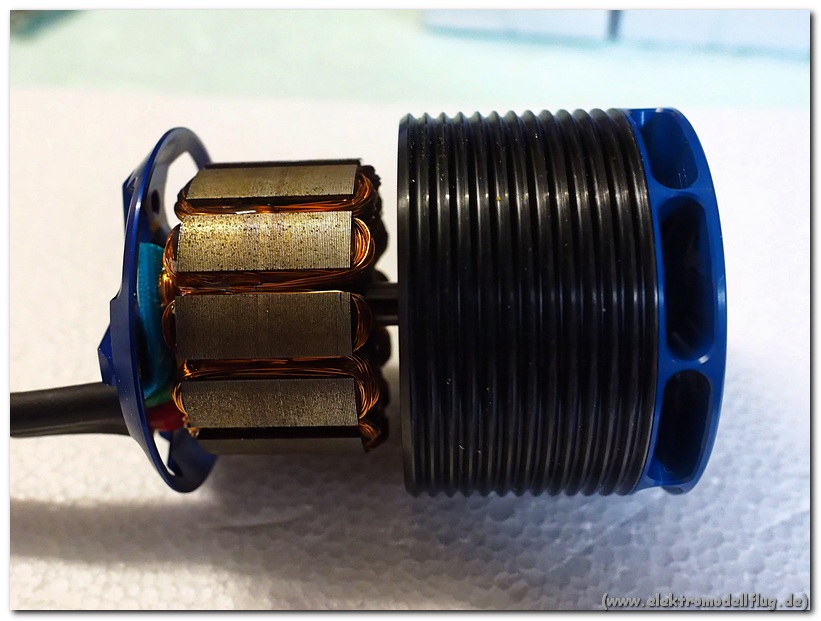
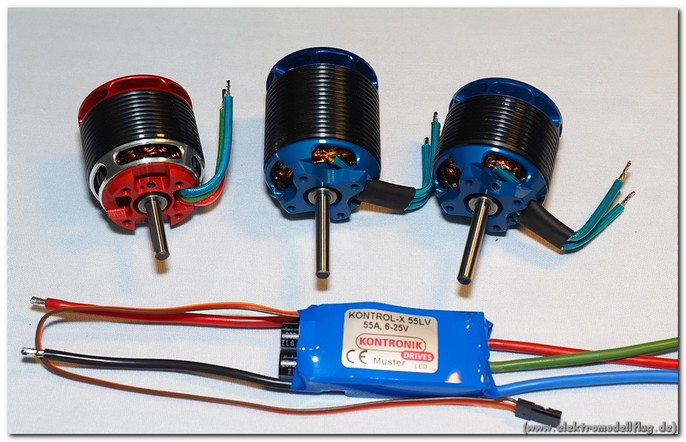
Multi-Stand- versus Single-Stand-Wicklung beim Spider. Nach der Rücksprache mit Kontronik+Sobek; bei den Spider Motoren von der Einzeldraht-Wicklung abzuweichen, erfuhr ich folgendes:
Multirotorsysteme laufen ausschließlich im tiefen Teillastbereich und niedrigerem Strombereich wo systembeding hoch getaktet wird. Die PWM ist mit 8khz/10khz/12khz, je nach Controller, voll aktiv zur deutlich niedrigeren Drehfeldfrequenz. Das ergeben zwei zusätzliche Probleme, die Kontronik+Sobek mit ihrer Wickeltechnik versucht zu minimieren. Als erstes ist der Skin-Effekt. Um den Skin-Effekt nun zu reduzieren, werden hohe Frequenzen über mehrere voneinander isolierte Drähte übertragen (Multi-Stand-Wicklung in dem die Kabel aus einzelnen Litzen bestehen), woraus sich Vorteile ergeben. Nur zur Info: Die Eindringtiefe des Stroms bzw. Skindicke in Abhängigkeit der Frequenz von 10 kHz beträgt ca. 0.6 mm. Ausführliche Versuche bestätigten der Multi-Stand-Wicklung, widerstandsfähiger gegen hochfrequente Resonanzen zu sein, was die Zuverlässigkeit erhöht. Nach wie vor werden die Spider maschinell gewickelt und die einzelnen Multi-Stand-Stränge exakt pro Nut vor einbringen in die Nut abgelängt, was Fehlströme innerhalb der Einzeldrähte minimiert. All das lässt teilw. diese Wicklungen "unsauber" aussehen weil eben nicht alle Drähte beim Wickeln den gleichen Radius erfahren und sich deshalb kleinste Schlaufen bilden können (siehe Abbildung rechts des geöffneten Motors). Anm.: Mich hätte natürlich interessiert wie stark dessen Auswirkungen (Wirkungsgrad, Lastverhalten...) wären gegenüber einer Singel-Wicklung wie bei den Pyros, aber die Chance hatte ich bisher noch nicht.
Meine Feststellungen in Stichworten …
Mechanisch:
- + Die gesamte Verarbeitung ist auf sehr hohem Niveau!
- + gehärtete Wellen mit exaktem Durchmesser (< 0,01 mm)
- + Welle (mit Teilabflachung), verklebt und mit einer Imbusschrauben in der Glocke gesichert
- - Spider-X ohne Zubehör für einen (Back-) Propmitnehmer bei einer gedrehten Frontmontage
- + sehr wirksame Radialbelüftung, Turbinengeräusch
- + Statorbleche aus 0,2er Material, optimierter Blechschnitt
- + Micropyro: Singel-Stand-Wicklung, guter Füllgrad, Hochtemperaturfest
- - Spider-X: Multi-Stand-Wicklung, nicht so sauber eingelegt, guter Füllgrad und Hochtemperaturfest
- + Spulenpakete leicht verklebt
- + Hochwertige, groß dimensionierte und abgedeckte Lager
- + Glocke ist sehr biegesteif konstruiert (siehe vorderen verstärkten Glockenrad, zweites Foto!)
- + Glocke ist statisch und dynamisch feingewuchtet
- + hoch durchmagnetisierte Neodymmagnete
- + hitzefestes Magnetmaterial bis 150 °C
- + 14 Magnete, zueinander sauber parallel verklebt
- + Toleranz der Magnetabstände unter +/- 0,1 mm Abweichend
- + geringer Stator-/Magnetabstand
- + Rückschluss (Glockendicke) gut gewählt, kaum Restmagnetismus bzw. Rastmomente (Pol-Überdeckung)
- + Glocke fein verippt zur Versteifung und optimierter Kühloberfläche
- + massive Schraubbefestigung (4 x M3/M4)
Elektrisch:
+ hervorragend übereinstimmende Spulendaten (Induktivität/Widerstand) der Stränge; unter 1,5% Differenz!
+ Sehr seidenweiches, turbinenartiges Laufverhalten bis zur Spannungsgrenze getestet
+ Feinwuchtung einwandfrei, keinerlei Resonanzen oder Vibrationen
+ Maximale Lastangaben werden sehr gut eingehalten.
+ Nur geringe Erwärmung innhalb einer typischen LiPo-Entladung
+ Spider-X 15/25 um die 80% im wichtigsten Bereich ~ 10A bei Multirotorsystemen
+ Spider-X 25-38 hat hier herausragende Daten mit über 83 % bei 7 A bis 13 A
+ Spider -XL 20-38/-45 liefert hervorragende Wirkungsgrade ab. Am Kontrol-X über 86%, am YGE um die 84%.
+ Spider -XL 20-38/-45 hat einen weiten Nutzbereich bei über 80% von <6A bis >45A
+ Einwandfreies Laufverhalten am YGE 120HV (12°-18°/V4), MEZON 120/130 (14°/V1.27) bei gutem Wirkungsgrad.
Diese Motoren haben eine hoche Fertigungs-/ und Verarbeitungsqualität unter den Serienmotoren erreicht. Die Singeldrahtbewicklung ist immer noch ein Novum unter den Serienprobanden! Bei den Spider Motoren wurde aus den oben genannten Gründen abgewichen. Einher geht die Füllgradoptimierung bei guter Durchflutung (= Kühlung). Die optimale Kühlluftführung (noch unerreicht in der Wirkung!) mit dem äußerst effizienten Radiallüfter trägt dazu bei. Dazu gesellt sich ein sehr breites Leistungsspektrum die den Herstellervorgaben jederzeit zu 100% gerecht werden. Es soll nicht abgedroschen klingen aber diese Qualität setzt die Line "Made in Germany" fort!
Die Motoren sind im DriveCalculator eingepflegt.
Die Datensätz wurden zu Vergleichszwecken (sporadisch) abwechelnd mit dem Jive von Kontronik, Mezon von Jeti und am YGE von Heino Jung erstellt!
Stand: September 2015/Dezember 2015